2007. 7. 4. 14:45ㆍWork/Robot
무척 간단하다.
% -------------------- M File Start --------------------
% Impulse Function
% n0, n1, n2
function [x,n] = impseq(n0,n1,n2)
n = [n1:n2];
x = [(n-n0) == 0];
% -------------------- M File End --------------------
% -------------------- M File Start --------------------
% Step FUnction
% n0, n1, n2
% n(from n1 to n2), compare with n0
% if n0
function [x,n] = stepseq(n0,n1,n2)
n = [n1:n2];
x = [(n-n0) >= 0];
% -------------------- M File End --------------------
---------- 기타 다음과 같은 명령어 실습 ----------
n=[0:20];
x1 = n.*(stepseq(0,0,20)-stepseq(10,0,20));
x2 = 10*exp(-0.3*(n-10).*(stepseq(10,0,20)-stepseq(20,0,20)));
x=x1+x2;
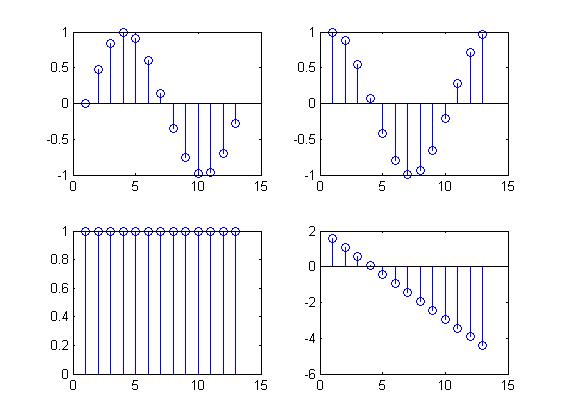
%% plot / Graph Command
th=0:0.5:2*pi
x=sin(th)+i*cos(th);
subplot(2,2,4):stem(phase(x));
subplot(2,2,3):stem(abs(x));
subplot(2,2,2):stem(imag(x));
subplot(2,2,1):stem(real(x));
x=[0 0 0 1 0 0 0];
h=[1 2 3 4 5 6 7];
y=conv(x,h);
'Work > Robot' 카테고리의 다른 글
| [TY52-DotMatrix] TY52 보드를 이용한 DotMatrix 핸디파일버젼 (1) | 2007.10.31 |
|---|---|
| [TY52-DotMatrix] TY52보드 이용, SLM1606 Dot - Matrix LED 작동 (0) | 2007.10.31 |
| TY52 보드 전광판 소스 - DOTMATRIX SLM1606M 사용 (0) | 2007.07.05 |
| DotMatrix LED 로 전광판 만들어보기 (0) | 2007.07.05 |
| 도트 매트릭스 LED 로 전광판처럼 만들고 싶을때... (0) | 2007.07.05 |